Транспортний потік. Стан транспортної мережі і характеристики транспортного потоку
Прийняття рішень по організації дорожнього руху та перевезень, планування роботи транспортних систем, оцінка ефективності функціонування вулично-дорожньої мережі можливі тільки на основі вивчення параметрів транспортних потоків і залежностей між ними в конкретних умовах. Тому збір і обробка інформації про залежності між основними характеристиками транспортних потоків - інтенсивністю, щільністю і швидкістю - є суттєвою частиною діяльності по організації дорожнього руху Зведена таблиця основних параметрів дорожнього руху наведена в таблиці 6.1.
Таблиця 6.1.

інтенсивність рухуq (x, t 1, t 2) - це кількість транспортних засобів, Що проходять через будь-яку перетин або відрізок дороги за одиницю часу (рис. 6.1). Найбільш часто в якості проміжку часу приймається одну годину, і, відповідно, інтенсивність руху визначається як авт / год. При вирішенні деяких завдань використовується інформація про добової і середньорічний інтенсивності руху.
Однією з основних особливостей зміни інтенсивності руху є її нерівномірність у часі і просторі. Розподіл інтенсивності руху за часовими періодами визначається цілями поїздок і їх частотою. Просторовий розподіл інтенсивності руху пов'язано з розподілом вантажно - і пассажирообразующих пунктів, їх концентрацією і потужністю.

Мал. 6.1. Схем руху транспортних засобів на ділянці Х 1 Х 2 впродовж часу t 1 ; t 2 .
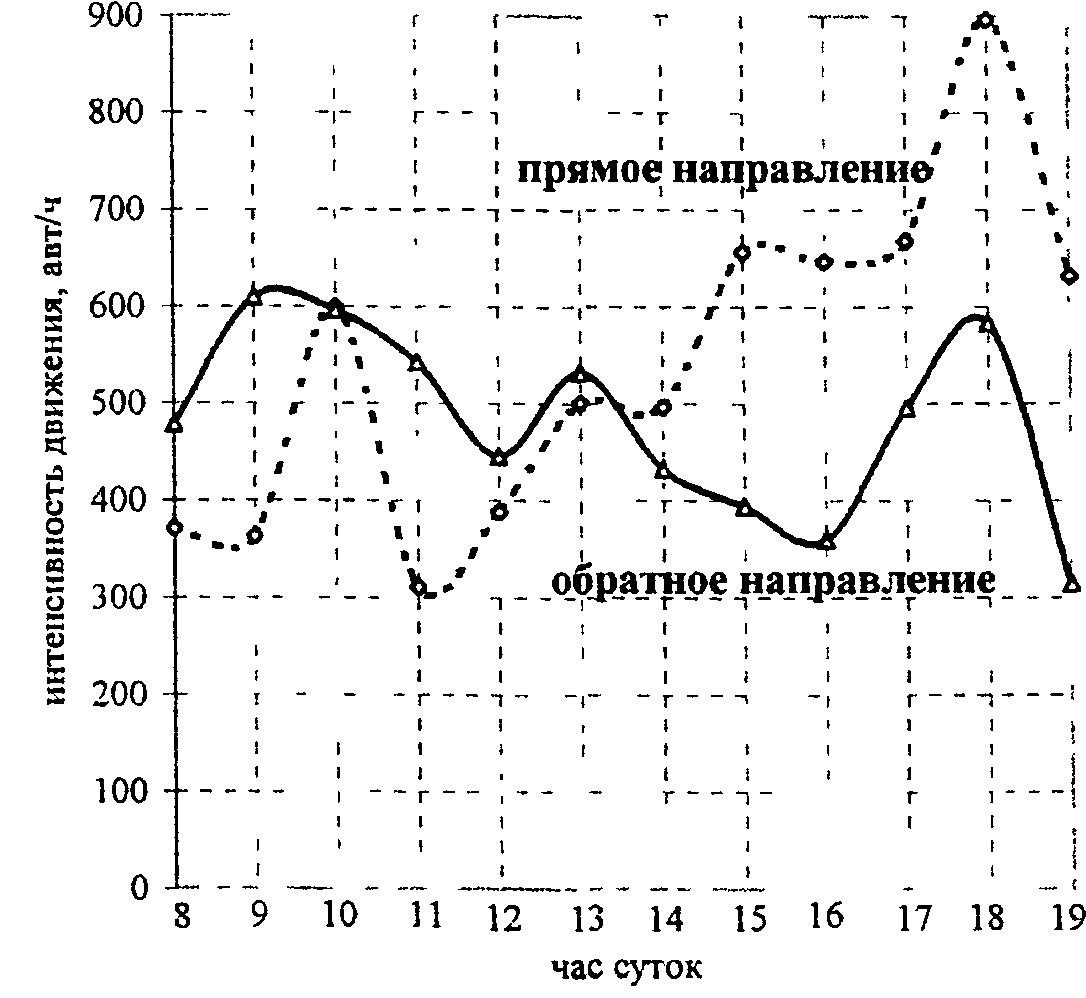
Фактори, що впливають на формування потреби в поїздках, в значній мірі схильні до впливу випадкової складової, відповідно, випадковим чином відбувається і зміна інтенсивності руху. Тому найбільш надійним методом оцінки транспортного навантаження є систематичне вимірювання інтенсивності руху на дорожньої мережі.Найважливішою інформацією, якою керуються при організації дорожнього руху, є відомості про пікові навантаження. Зміна інтенсивності руху протягом доби характеризується перш за все наявністю ранкового і вечірнього годин пік. Протягом цих періодів часу відзначається висока транспортне навантаження, яка створює значні проблеми учасникам дорожнього руху. Під час години пік транспортне навантаження становить близько 15% добової. Типовий графік зміни інтенсивності руху протягом доби наведено на рис. 6.2.
Мал. 6. 3. Виділення пікового періоду часу
Аналіз зміни транспортного навантаження показує, що, внаслідок нерівномірності зміни інтенсивності руху, всередині години пік можливе існування періодів часу, в які інтенсивність перевищує среднепіковие навантаження Тому інтенсивність руху в годину пік рекомендується аналізувати по п'ятихвилинним періодам У цьому випадку виділяють піковий період - безперервний інтервал часу, протягом якого п'ятихвилинні інтенсивності руху перевищують середню для всього години пік інтенсивність (рис. 6.3).В даному прикладі інтенсивність руху в 15-хвилинний період пік на 20% перевищує середню інтенсивність за годину пік. Ігнорування цього фактора може привести до помилкових рішень при розробці схем організації дорожнього руху.
Сезонні коливання інтенсивності руху сприяють формуванню щільних транспортних потоків в літній період часу.
Просторові коливання інтенсивності руху проявляються в різному рівні транспортного навантаження на різних ділянках вулично-дорожньої мережі.

 (6.1)
(6.1)
Так, наприклад, коефіцієнт річний нерівності
 (6.2)
(6.2)
Де 12 - число місяців в році, q i – інтенсивність руху за аналізований місяць.
Інтенсивність руху впливає на транспортні витрати (рис. 6.4).
складтранспортного потоку істотно впливає на умови і режими руху автомобілів. Оцінка складу транспортного потоку здійснюється, в основному, по процентному складу або частці транспортних засобів різних типів. Об'єктивна оцінка рівня транспортного навантаження, порівняння рівня завантаження різних магістралей можуть бути зроблені тільки з урахуванням складу транспортного потоку.
Вплив складу потоку на інші характеристики дорожнього руху обумовлено багатьма факторами. Багато в чому це відбувається внаслідок відмінності динамічних і гальмівних якостей легкових і вантажних автомобілів. На рис. 6. 5 наведено нормативні дані про довжину гальмівного шляху для вантажних і легкових автомобілів. В процесі експлуатації ці відмінності стають ще більш відчутними. Тому в змішаному транспортному потоці підвищується ймовірність виникнення потенційно небезпечних ситуацій.
Більш низька швидкість руху вантажних автомобілів в порівнянні з легковими змушує водіїв легкових автомобілів здійснювати обгони для підтримки прийнятного для них швидкісного режиму. Маневрування здійснюється в умовах обмеженої видимості при проходженні легкового автомобіля за вантажним і також підвищує ризик потрапляння в ДТП.
Всі ці аспекти зумовили необхідність застосування коефіцієнтів приведення до умовного легковому автомобілю. Визначення значень коефіцієнтів приведення базується на порівнянні динамічних габаритів різних типів транспортних засобів Динамічним розміром автомобіля Dназивается відрізок смуги дороги, що включає довжину автомобіля і дистанцію, необхідну для безпечного проходження за що їхав (рис. 6.6).
Відповідно до СНиП 2 05-85 значення коефіцієнтів приведення до умовного легковому автомобілю слід приймати
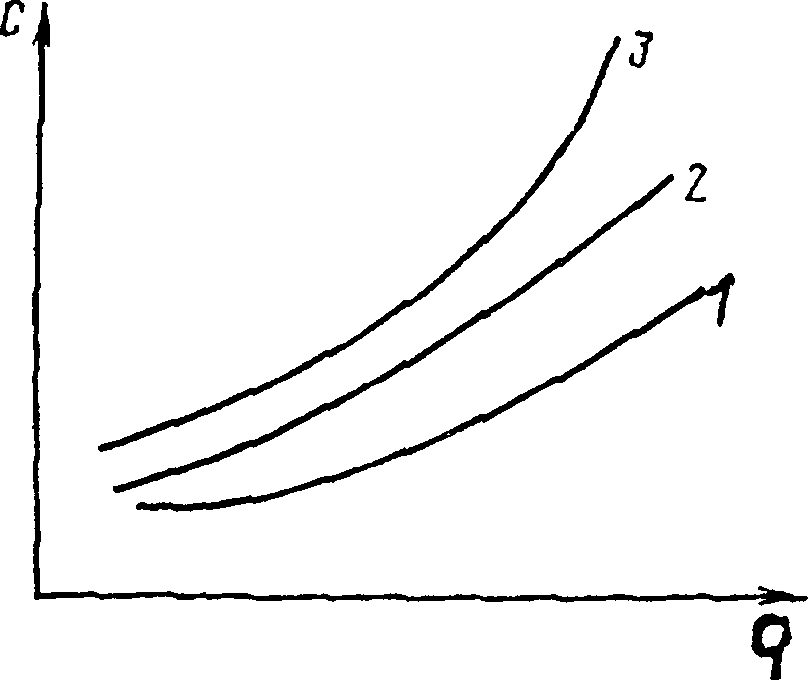
Мал. 6.4. Зміна витрат С на пробіг в залежності від інтенсивності qруху: 1 - легковий автомобіль; 2 - вантажний автомобіль; 3 - автопоїзд.
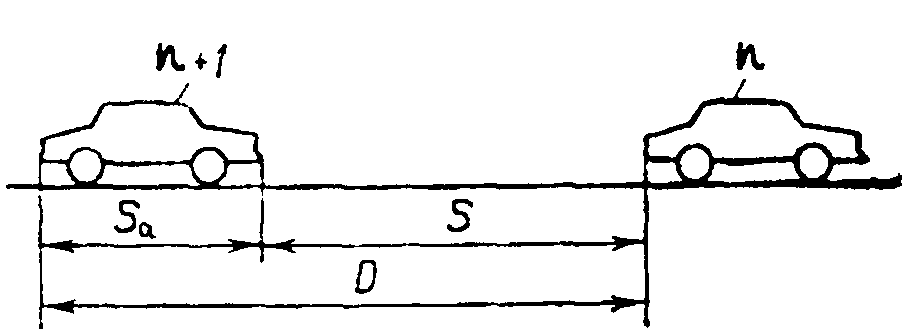
Мал. 6.6. Динамічний габарит автомобіля
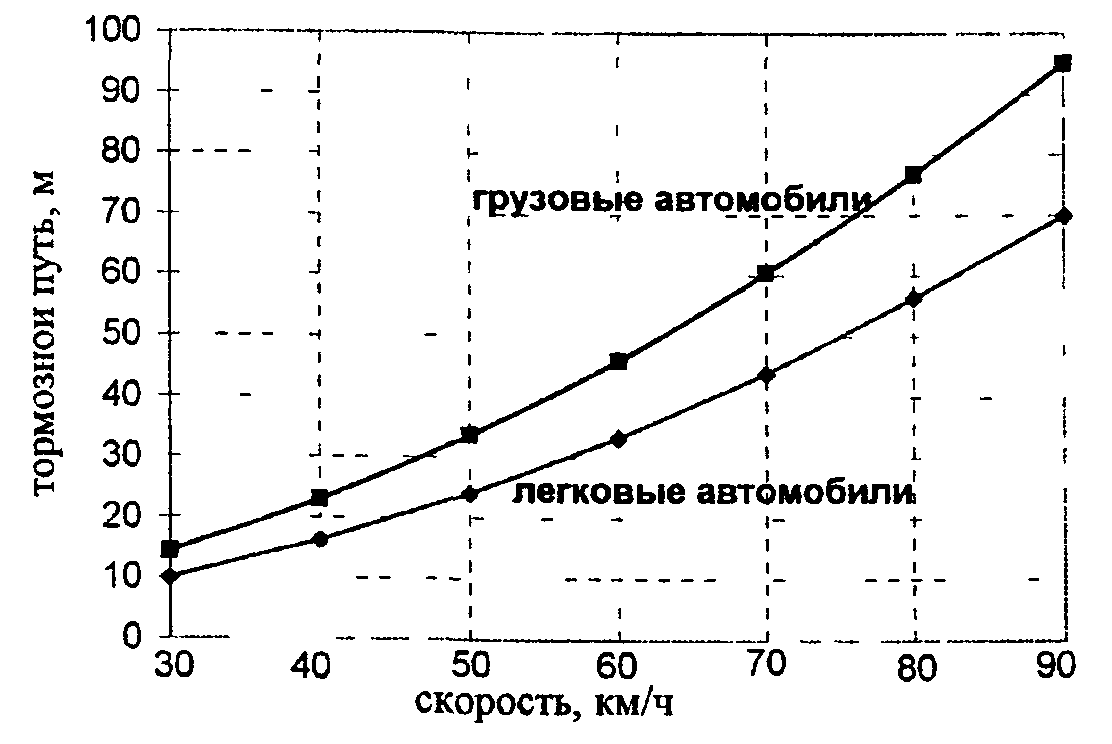
Мал. 6.5. Нормативні значення гальмівного шляху легкових і вантажних автомобілів залежно від швидкості
|
легкові автомобілі | |
|
вантажні автомобілі вантажопідйомністю: | |
|
від 2 до 6 т | |
|
від 6 до 8 т | |
|
від 8 до 14 т | |
|
понад 14 т | |
|
автопоїзда вантажопідйомністю до 12 т | |
|
автопоїзда вантажопідйомністю від 12 до 20 т | |
|
автобуси | |
|
тролейбуси | |
|
зчленовані автобуси і тролейбуси |
Розрахунок інтенсивності руху в наведених одиницях здійснюється за формулою
де q пр - інтенсивність руху в наведених одиницях, q i - інтенсивність руху автомобілів i-го типу, До пр i - коефіцієнт приведення автомобілів i - го типу
Важливість використання коефіцієнтів приведення при вирішенні практичних завдань організації дорожнього руху видно на прикладі аналізу транспортного навантаження на двох ділянках доріг. На першій ділянці при сумарній інтенсивності руху 500 авт / год розподіл автомобілів за типами має наступний вигляд легко ші - 400, вантажні вантажопідйомністю до 2 т - 80, автобуси - 20 на іншій ділянці при тій же інтенсивності руху 500 авт / год склад потоку відрізняється: легкові - 200, вантажні до 2 т - 100, вантажні від 2 до 6 т - 100, автопоїзда до 12 т - 60, автобуси - 40. З урахуванням складу потоку інтенсивність руху в наведених одиницях на першій ділянці становить 570 авт / год, на другому - 760 авт / год.
Залежно від переважання в потоці того чи іншого типу транспортного засобу умовно транспортний потік відносять до однієї з трьох груп: змішаний потік (30-70% легкових автомобілів, 70-30% вантажних автомобілів), переважно вантажний (більше 70% вантажних автомобілів), переважно легковий (більше 70% легкових автомобілів)
Щільність транспортного потоку k (х 1 , x 2 , t) визначається числом транспортних засобів, що припадають на 1 км смуги дороги. Одиниця виміру щільності транспортного потоку - авт / км. Зі збільшенням щільності транспортного потоку скорочується дистанція між автомобілями, знижується швидкість руху, збільшується напруженість праці водія, погіршуються умови руху. Максимальна щільність транспортного потоку досягається в заторових ситуаціях. Чисельні значення максимальної щільності визначаються складом потоку. Для змішаного складу транспортного потоку вона становить близько 100 авт / км, для переважно легкових автомобілів - до 150 авт / км.
Основні труднощі використання інформації про щільність транспортного потоку пов'язані зі складністю безпосереднього вимірювання цього параметра дорожнього руху.
В організації дорожнього руху в залежності від методів вимірювання і розрахунку склалася певна термінологія при характеристиці швидкості.
Тимчасова (миттєва) швидкість - швидкість транспортного засобу в будь-якому перетині дороги. Вимірювання миттєвої швидкості не становить труднощів, т к. При цьому використовуються різноманітні засоби вимірювань: секундомір, що фіксує проходження мірного ділянки; відеокамера; радар; транспортний детектор. Крім того, для отримання достовірних результатів можна заміряти швидкості безлічі автомобілів в транспортному потоці. Тому миттєва швидкість найбільш широко застосовується в практичній діяльності по організації дорожнього руху.
Просторова швидкість оцінює зміну швидкісного режиму по довжині магістралі. Найбільш повно характеризує умови руху на вулично-дорожньої мережі. Однак подібну інформацію можна отримати тільки в процесі безперервного запису швидкості з використанням дорожньо - дослідної лабораторії. Достовірність результатів вимірювань забезпечується багаторазовим проїздом по досліджуваної магістралі.
Швидкість руху оцінюється тільки з урахуванням часу руху автомобіля по вулично-дорожньої мережі.
Швидкість повідомлення визначається з урахуванням затримок при русі.
На основі даних про швидкість транспортного потоку можна визначити такий питомий показник, як темп руху - величину, зворотну швидкості повідомлення. Темп руху оцінює час проходження одиниці довжини маршруту і надає наочну інформацію про умови організації руху і перевезень.
У загальному вигляді співвідношення між інтенсивністю, щільністю і швидкістю описується основним рівнянням транспортного потоку:
деq - інтенсивність руху,k - щільність транспортного потоку,v - швидкість транспортного потоку.
Відповідні графіки наведені на рис. 6.7.
Графік залежності між інтенсивністю і щільністю зазвичай називають основною діаграмою транспортного потоку. На цьому графіку простежуються основні закономірності зміни стану транспортного потоку. Перша гранична точка відповідає нульовий інтенсивності і щільності і характеризує вільні умови руху. Спочатку збільшення щільності викликає зростання інтенсивності руху, і цей процес триває до досягнення пропускної здатності дороги. Подальше збільшення щільності призводить до значного погіршення умов руху, виникнення заторових ситуацій, зниження інтенсивності руху. Друга гранична точка відповідає повній зупинці руху при максимальній щільності і нульовий інтенсивності.

Мал. 6.7. Залежності між інтенсивністю, щільністю і швидкістю.
Виходячи з основного рівняння транспортного потоку, тангенс кута нахилу радіус-вектора, проведеного з початку координат основний діаграми до будь-якої точки графіка (в даному випадку точка 1), показує швидкість руху при даній інтенсивності і щільності.
Затримки руху характеризуються втратою часу при проходженні транспортним засобом заданої ділянки зі швидкістю повідомлення нижче оптимальної:
деv ф; v про - відповідно фактична і оптимальна швидкості повідомлення.
Оптимальною швидкістю в даному випадку слід вважати швидкість повідомлення, що забезпечує мінімум втрат часу, палива, витрат, пов'язаних із зносом автомобіля, втрат від ДТП і т. Д. З огляду на труднощі визначення справжнього значення оптимальної швидкості в практиці організації руху умовно в якості оптимальної приймають дозволену ( розрахункову за умовою безпеки) швидкість на даній ділянці дороги.
Втрати часу транспортного потоку
деq - сумарна інтенсивність руху.
Розрізняють затримки на перегонах і пересічних. Затримки на перегонах є результатом маневрування, наявності в потоці автомобілів, що рухаються з малими швидкостями, руху пішоходів, зупинок і стоянок транспортних засобів, перенасиченості потоку. Затримки на перетинах є результатом необхідності пропуску транспортних і пішохідних потоків по пересічних напрямах.
У сукупності всі ці залежності дозволяють прогнозувати зміну стану транспортного потоку і пропускної здатності при плануванні заходів щодо вдосконалення організації дорожнього руху та розвитку вулично-дорожньої мережі
З кн. Коноплянко В. І., Гуджоян О. П., Зирянов В. В., Березін О. С. «Безпека руху ». Навчальний посібник. Кемерово 1998 р
6. 1. КЛАСИФІКАЦІЯ ТЕХНІЧНИХ ЗАСОБІВ ОДР
Технічні засоби організації дорожнього руху (ТСОДД) призначені для регулювання руху транспортних і пішохідних потоків. Регулювання (від латинського regula - норма, правило) ДД - це підтримка на певному рівні показників пішохідних і транспортних потоків, з метою забезпечення ефективності та безпеки дорожнього руху.
За призначенням ТЗ діляться на:
Засоби інформування учасників руху (світлофори, дорожні знаки і покажчики, дорожня розмітка, напрямні пристрої);
Пристрої, що забезпечують нормальне функціонування засобів інформації (контролери, детектори, пристрої обробки і передачі інформації, засоби диспетчерського зв'язку, ЕОМ і т. Д.);
Розглядаючи засоби інформування з позицій основного її користувача - водія, можна умовно розділити їх по формування знань і місцем отримання.
З позицій формування знань інформація може бути класифікована наступним чином (рис 6. 1):
Апріорна (дослідна) професійна інформація, що формує знання законів дорожнього руху, навички з управління транспортним засобом і т. П. Її формування відбувається в процесі навчання і всього подальшого професійного досвіду;
Макроінформацію, що формує знання про напрямок руху для досягнення мети поїздки,
Мікроінформація, що формує знання про вибір водієм оперативного режиму руху.
За місцем отримання інформація може бути при дорожньому і внедорожном русі (див. рис. 6. 1).
Роль позашляхової інформації в ефективності і безпеки руху полягає, перш за все, у створенні та підвищенні рівня апріорної інформації.
Макроінформацію. Вузьким місцем в ОДР в даний час є низька інформаційне забезпечення учасників дорожнього руху засобами управління і організації дорожнього руху.
Макроінформацію формує знання водіїв про напрямок руху. Недолік або повна відсутність такого виду інформації призводить до ряду негативних наслідків.
За зарубіжними даними, у Великобританії через незадовільний розміщення дорожніх знаків, недоліків дорожнього освітлення та іншого відбувається 28% всіх ДТП, перепробіг автомобілів, викликаних помилками водіїв при виборі напрямку руху, становить 4 - 6, 5% від загального пробігу, додаткові витрати палива при цьому складають близько 1100 млн. літрів на рік. За попередніми економічним оцінками розробляється система інформування водіїв (орієнтування, відомості про метеорологічні умови, небезпечних зонах по ходу руху і т. Д.) У Великобританії заощадить близько 2 млрд. Ф. ст. на рік. Таким чином, проблема вдосконалення інформаційного забезпечення дорожнього руху видається актуальною і її рішення дозволить істотно знизити сумарні втрати автомобільного транспорту.
Макроінформацію, що є керуючою за своєю природою, можна розділити на два види: орієнтування і вказівка. З'явилися останнім часом автомобільні навігаційні системи відносяться до класу інформують і орієнтують систем, що представляють собою автоматизовані персональні системи, що допомагають конкретним водіям у виборі найбільш оптимального маршруту. Заповнення західного ринку такими системами йде досить високими темпами і очікується, що до 2000 р вже на 10 млн. Автомобілів будуть встановлені такі навігаційні системи.
Прогрес в радіоелектроніці, обчислювальній техніці та інформатики забезпечив досить широкий розвиток інформаційно-навігаційних систем на автомобільному транспорті. Автомобільні навігаційні системи, запозичили свою назву з морської і авіаційної термінології, можна віднести до наступного покоління автоматизованих систем управління рухом (АСУД). Їх застосування дозволяє знизити час і вартість поїздки і, крім того, дає можливість водієві оперативно коригувати свій маршрут.
Подібні системи побудовані за наступним логічному алгоритму:
1) визначення просторової координати даного ТЗ на дорожньої мережі в даний момент часу;
2) визначення маршруту руху ТЗ від місця знаходження до місця призначення і доведення цього маршруту до водія;
3) забезпечення користувача, що знаходиться в ТС, можливістю передачі і прийому інформації з відображенням на дисплеї (або в іншому вигляді).
Використання навігаційних систем має розглядатися як ресурсозберігаючий фактор на автомобільному транспорті. Ефективність застосування таких систем полягає в мінімізації насамперед часу поїздки, економії палива, зниження рівня забруднення навколишнього середовища, амортизаційних витрат і зменшення психофізіологічного напруження водіїв .. Поширення автомобільної навігації в масовому масштабі дозволить забезпечити оптимальний розподіл транспортних потоків по вулично-дорожньої мережі та підвищити безпеку руху.
При постійному зростанні інтенсивності дорожнього руху та випуску моделей автомобілів з усе більш наростаючими динамічними характеристиками виникає проблема вдосконалення систем забезпечення безпеки і зниження економічних втрат дорожнього руху Один з можливих шляхів вирішення цієї проблеми полягає в удосконаленні системи дорожньої інформації.
В останні роки за кордоном намітилася тенденція до введення в систему інформації дорожнього руху елементів, призначених для передачі учасникам дорожнього руху відомостей, необхідних при плануванні і виборі маршруту проходження. Іншими словами, інформації, що забезпечує орієнтування учасників руху.
Водії зараз мають широкий доступ до різних джерел інформації, які допомагають їм досягти пункту призначення найкоротшим і найбезпечнішим шляхом. Діапазон цих коштів досить великий - від друкованих матеріалів, таких як карти, до зведень про дорожню обстановку, що передаються по радіо. Сюди ж відносяться і дорожні покажчики напрямків руху.
Досі такі кошти допомоги здебільшого служили лише додатковими зручностями для водіїв, т. К. Було можливо в більшості випадків дістатися до пункту призначення, не вдаючись до їх допомоги. Однак сьогодні ця ситуація постійно змінюється у зв'язку зі зростанням числа транспортних засобів і збільшенням щільності руху. В силу ряду причин, таких як необхідність економії пального і часу, інформація про дорожню обстановку стає все більш актуальною.
Цільовою функцією дорожнього руху є швидке, економічне і безпечне переміщення вантажів і пасажирів. Реалізація цільової функції можлива при наявності маршруту, що з'єднує початковий і кінцевий пункти поїздки. Можливість вибору альтернативних маршрутів має на увазі рішення оптимізаційної задачі з метою вибору оптимального по заданому критерію маршруту, але недостатньо тільки розрахувати маршрут, необхідно ще і забезпечити умови його дотримання, т. К. Позитивний ефект може бути досягнутий тільки в разі забезпечення руху транспортних засобів саме за цими оптимально обчисленим маршрутами. Таким чином, завдання вказівки маршруту руху є логічним завершенням поставленого завдання оптимізації.
Відхилення від оптимального маршруту неминуче призводить до непродуктивних витрат. Зарубіжні експерименти показали, що час, витрачений на пересування від вихідного пункту до заданого при наявному інформаційному забезпеченні дорожнього руху, може перевищувати оптимальне більш ніж в 2 рази, при цьому витрата палива на 35%, а пробіг автомобілів на 30% і більше перевищують оптимальне значення (при ідеальному маршруті) .Прічем ймовірність відхилення від маршруту збільшується, якщо водій слід таким шляхом вперше. У зв'язку з цим, а також інші актуальні завданнями організації дорожнього руху необхідно розглядати завдання створення системи орієнтування водіїв, які перебувають на незнайомих маршрутах.
Завдання організації дорожнього руху на сьогоднішній день ускладнилися настільки, що ефективне управління ним неможливо забезпечити тільки традиційними елементами системи інформації дорожнього руху - дорожніми знаками і покажчиками, дорожньою розміткою, світлофорами і направляючими пристроями. Позначається, з одного боку, обмеженість можливості водія по сприйняттю інформації про дорожній рух через так званого "дефіциту часу", в умовах якого постійно перебуває людина, керуючий транспортним засобом. З іншого боку, позначаються лімітовані можливості засобів інформації за видами і, головне, оперативності інформації, що передається.
В умовах ускладнення вулично-дорожніх мереж міст і накладається на ці мережі системи організації руху для водія все більш необхідною стає можливість отримання інформації стратегічного характеру, на основі якої він може оцінити і спрогнозувати обстановку на майбутньому шляху проходження. У зв'язку з цим також актуальною стає мета розробки принципів організації системи маршрутного орієнтування та інформування водіїв, що допомагає їм у виборі найбільш оптимального маршруту. Такі системи відносяться до класу навігаційних систем Їх основна мета - мінімізація часу і вартості поїздки.
![]()
Мал. 6. 1. Класифікація засобів інформації
В даний час робляться успішні спроби застосування різних методів навігації для використання на автомобільному транспорті. До таких методів належать:
счіслітельние (автономні);
радіогоніометріческіе;
інерційні;
з використанням навігаційних маяків;
гіперболічні;
разностно-дальномірні.
Останні два методи відносяться до супутникової навігації, на відміну від радіолокаційних методів, які використовують радіостанції наземного базування. Класифікація методів навігації представлена \u200b\u200bу вигляді схеми (рис. 6.2).
Кожен з цих методів має свої особливості, що випливають із суті самих методів.
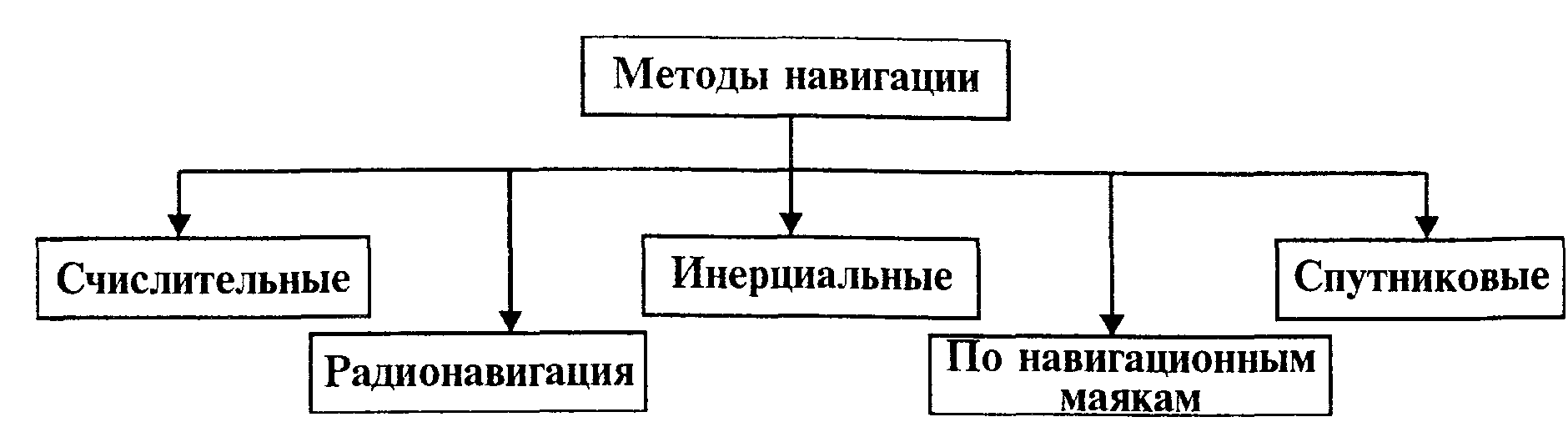
Мал. 6. 2. Класифікація методів навігації
при автономних методах здійснюється визначення місця розташування (навігація) транспортного засобу з урахуванням числення пройденого шляху і напрямки руху, виходячи з координат відомої початкової точки маршруту. Вони забезпечують безперервну інформацію про місцезнаходження об'єкта, але точність цієї вказівки убуває зі збільшенням часу руху і пройденого відстані. Счіслітельние методи прості і зручні в обслуговуванні.радіонавігація визначає місце розташування транспортного засобу по різниці відстаней від нього до двох пар синхронно працюючих наземних радіостанцій. Точність системи визначається ймовірністю загасання і відображення радіохвиль в просторі і можливими перешкодами.
інерціальна навігація заснована на використанні гіроскопів і акселерометрів. Такі системи не прості в обслуговуванні через необхідність підтримки необхідної частоти обертання гіроскопів.

Мал. 6. 3. Схема передачі керуючої інформації водієві: Д - датчики даних про умови дорожнього руху; БД - збір даних про умови руху; ЦУ - центр управління; УІ - керуюча інформація, що виробляється; ЦУ, А - автомобілі.
У методі, заснованому на використанні навігаційних маяків,ці так звані "маяки" є джерелами інформації, що забезпечують водіїв інформацією про місце їх автомобілів. Точність такої системи залежить від того, наскільки часто розташовані маяки. Робота системи не схильна до систематичної похибки, властивою счіслітельним системам. До їх недоліків відносяться: неможливість визначення місцезнаходження поза зоною досяжності маяка; необхідність наявності маяків на кожному перехресті; система не має властивість безперервності і не може бути використана в масштабі всієї території країни.супутникова навігація, що є різновидом радіонавігації, відрізняється тими ж недоліками, що і система навігаційних маяків (відсутність безперервності спостереження за відсутності контакту із супутником), але дозволяє охоплювати великі території (в принципі - всю земну кулю) і характеризується сталістю точності визначення місця розташування транспортного засобу на всьому маршруті.
Необхідно відзначити, що в даний час відбувається злиття різних методів навігації для створення систем орієнтування, що компенсують недоліки кожного методу. Тим самим забезпечується можливість роботи системи в різних умовах.
Основними елементами будь-якої навігаційної системи є датчики навігаційної інформації, навігаційний обчислювач і засоби відображення і надання отриманої інформації. Всі навігаційні системи мають схожу структуру управління, яку можна описати у вигляді так званої "петлі управління".
Дані про умови дорожнього руху збираються датчика ми, розташованими вздовж доріг, і обробляються в центрі управління, який розраховує шлях проїзду автомобіля і передає інформацію, що управляє водієві. Ця інформація різними способами передається на прилади, розташовані в автомобілі. Така схема управління представлена \u200b\u200bна рис. 6. 3.
Таким чином, виходить замкнута система управління, що складається з керованої системи (автомобіля, а точніше, водія), керуючої системи (центру управління) і ланцюгів управління (каналів зв'язку або впливу однієї системи на іншу). Залежно від рівня складності системи деякі елементи можуть не входити до її складу.
Навігаційні системи включають в себе системи колективного і персонального дії. Колективне дію означає, що одні й ті ж повідомлення отримують всі водії, незалежно від потреби їх в цій інформації. Системи ж індивідуальної дії забезпечують водієві передачу тільки тих повідомлень, які він запитує.
Технічна реалізація цих систем ґрунтується на самих різних принципах механічних, електронних, космічного зв'язку і т. Д.
Відповідно до існуючих методами навігації на сьогоднішній день можна дати таку класифікацію автомобільних навігаційних систем за наявністю ліній зв'язку автономні системи, системи з одностороннім зв'язком, системи з двостороннім зв'язком між бортовим навігаційним комплексом автомобіля і центром управління За типом використовуваних в кожній системі даних їх можна розділити на два класи Перший клас - системи, що працюють на основі фіксованих (постійних) даних про дорожню мережу, умови руху та т. д. - клас статичних систем Другий клас - системи, які мають періодично змінюються даними, - клас динамічних систем.
До автономних систем можна віднести маршрутні комп'ютери і системи, що використовують счіслітельний метод навігації В системах з одностороннім зв'язком можна виділити два підкласу, обумовлених історичним розвитком цього різновиду систем інформування водіїв - радіомаяки і радіоінформатори До цього типу систем відносяться також системи диспетчерського зв'язку на міському пасажирському транспорті І , нарешті, системи з двостороннім зв'язком являють собою найбільш складну систему вказівки маршрутів руху, що використовує стаціонарні обчислювальні центри
Класифікацію систем інформування та навігації водите лей можна представити у вигляді табл. 6. 1. Функції систем різних класів представлені в табл. 6 2
Таблиця 7.1.
Класифікація навігаційних систем за типом використовуваних даних
|
статична |
фіксовані |
Наявність каналів зв'язку |
||
|
автономні |
односторонні |
двосторонні |
||
|
маршрутні комп'ютери |
радіомаяки | |||
|
динамічна |
змінні |
Радіоінформатори |
Системи вказівки маршрутів |
|
Транспортний потік складається з окремих автомобілів, Що володіють різними динамічними характеристиками і керованих різними за кваліфікацією водіями, т. е. він не є однорідним.
В умовах малоинтенсивного руху, коли по дорозі рухаються окремі транспортні засоби з великими інтервалами, водія у виборі режиму руху обмежують Правила руху, стан автомобіля і дороги. У щільному транспортному потоці водій не вільний у виборі швидкості руху, він не завжди може зробити обгін і його поведінка в значній мірі визначається загальним ритмом руху на дорозі. Отже, інтенсивний транспортний потік нівелює різницю в характеристиці окремих водіїв та машин.
Спостереження показали, що рух щільного транспортного потоку по вулиці або дорозі нагадує рух води в каналі. Якщо швидко перепинити шлях потоку води в каналі, то він миттєво зупиниться і по поверхні пробіжить зворотна хвиля.
Ефект зворотної хвилі стосовно транспортному потоку виражається в різкому зниженні швидкості уздовж колони і скорочення інтервалів між автомобілями.
Добре відомо, що канал певного перерізу може пропустити цілком певну кількість води в одиницю часу. Якщо ми хочемо пропустити через канал більшу кількість води, то повинні збільшити його перетин. Щось подібне відбувається і з транспортним потоком, що рухається по своєму каналу - вулиці або дорозі. Проїжджа частина певної ширини може пропустити цілком певну кількість автомобілів, і якщо ми хочемо збільшити її пропускну здатність, то повинні розширити дорогу.
Ця аналогія дала фахівцям підставу застосувати для вивчення закономірностей транспортних потоків закони руху рідини. Така модель, правда, з певними обмеженнями дозволяє проводити важливі дослідження і вирішувати ряд практичних питань з регулювання руху.
транспортний потік можна характеризувати трьома основними параметрами: інтенсивністю N, середньою швидкістю V і щільністю D . Ці параметри пов'язані основним рівнянням транспортного потоку: N \u003d DV.
Графічно це рівняння являє собою основну діаграму транспортного потоку, загальний вигляд якої показаний на рис. 1.

Мал. 1. Основна діаграма транспортного потоку
Користуючись рівнянням і діаграмою, можна визначати характеристики транспортного потоку. Так, середня швидкість виражається через тангенс кута нахилу прямої, що з'єднує початок координат з точкою, координати якої характеризують певну інтенсивність і щільність (N / D).
Максимально можлива при даних умовах інтенсивність руху, як це випливає з діаграми, досягається при певній щільності транспортного потоку (точка A на діаграмі) і називається пропускною спроможністю смуги руху або дороги в цілому. Характерно, що при щільності потоку, більшою, ніж в точці A, інтенсивність руху знижується. Пояснюється це тим, що при великій щільності руху, часто виникають затори, знижується швидкість і це призводить до зменшення кількості автомобілів, що проходять в одиницю часу через будь-яку перетин або ділянку дороги.
З основної діаграми і рівняння транспортного потоку слід дуже важливий для регулювання руху висновок: в тих випадках, коли виникає потреба пропустити по дорозі максимально можливу кількість автомобілів, необхідно встановити за допомогою знаків певний режим швидкості, який забезпечує найбільшу інтенсивність.
Як показують спостереження, при сприятливих умовах руху звичайна двухполосная дорога з шириною проїзної частини 7 - 7,5 м може пропустити не більше 2000 автомобілів на годину. Максимальна інтенсивність досягається при швидкості приблизно 50-60 км / ч. (Лобанов Є.М., Сільянов В.В. та ін. Пропускна здатність автомобільних доріг).
Однією з характеристик руху є свобода обгонів в транспортному потоці. Потреба в обгонах з'являється внаслідок різнорідності складу потоку - легкові автомобілі і швидкохідні вантажні для підтримки бажаної швидкості прагнуть обігнати повільно рухаються транспортні засоби. Зі збільшенням інтенсивності руху потреба в обгонах зростає, а можливості для їх реалізації зменшуються, Оскільки в зустрічному потоці стає все менше і менше інтервалів, які забезпечують безпечні умови маневру. Спостереження показують, що обгін протікає вільно, коли в зустрічному потоці інтервал між автомобілями має таку величину, яка може бути подолана за 20 с і більше. Якщо цей інтервал виявляється менше 7 с, то обгін стає практично неможливим.
Звичайно, окремі досвідчені водії, керуючи легковим автомобілем з хорошими динамічними якостями, можуть зробити обгін і при менших інтервалах, але це пов'язане з великим ризиком.
У табл. 1. наведено дані, що характеризують можливості здійснення обгонів на звичайній дорозі шириною 7 - 7,5 м при різної інтенсивності руху. Як показують розрахунки, при інтенсивності руху 100 авт / год в транспортному потоці 70% всіх інтервалів більше 20 з, і тому обгони можуть відбуватися порівняно вільно. при інтенсивності 900 авт / год таких інтервалів залишається тільки 4%, і це набагато ускладнює умови обгону. Спостереження, що проводилися Московським автомобільно-дорожнім інститутом, показують, що обгони вже практично не відбуваються, коли сумарна інтенсивність руху на дорозі в обох напрямках досягає 1500- 1800 авт / год. Відбувається це через зменшення в транспортному потоці безпечних для обгону інтервалів.
Таблиця 1.
Розподіл кількості інтервалів різної тривалості в транспортному потоці при різної інтенсивності руху
|
Інтенсивність руху на дорозі, авт / год |
Кількість інтервалів,% | ||
| До 10 з | Від 10 с до 20 с |
Більше 20 з |
|
| 8 | 22 | 70 | |
| 44 | |||
| 34 | 49 | ||
| 44 | 48 | ||
| 900 | 53 | 43 | |
До атегорія:
Перевезення великогабаритних вантажів
Стан транспортної мережі і характеристики транспортного потоку
Проблеми провезення великогабаритних великовагових вантажів зажадали розгляду їх впливу на загальний транспортний потік. Це пов'язано з тим, що в вантажний і пасажирський потоки, особливо при наявності в даному регіоні вузьких або вичерпали резерв пропускної спроможності ділянок транспортної мережі, вливається автомобіль-ваговоз як рівноваги вплив на загальний хід транспортного процесу.
На ділянках, що вичерпали пропускну здатність, спостерігається підвищена щільність руху, групове рух перетвориться в колонне зі зниженням можливостей обгону (маневру) і швидкостей, особливо якщо автомобіль-ваговоз стає на дорозі «лідером». Такий автомобіль здатний створити заторова стан на дорозі, що призводить до зниження швидкостей руху всіх учасників процесу, до різкого падіння продуктивності рухомого складу та збільшення часу затримки пасажирів у дорозі.
На міських дорогах відбувається стійке зростання обсягів вантажних перевезень, Наприклад в Москві він збільшується щорічно на 17 ... 20%. Це характерно і для більшості великих міст інших країн.
За даними Держкомстату на автомобільний транспорт припадає 70% внутрішньоміських вантажних перевезень. Найбільш завантаженою стають центральна і серединна частини міст (в Москві відповідно 31,5 і 45,6% вантажообігу). У вантажних потоках переважають будівельні вантажі, що мають найменшу стійкість за напрямками. Дальність перевезення вантажів збільшується. У Москві, наприклад, вона становить 20,6 км.
Чисельність парку вантажних автомобілів також має тенденцію до зростання, причому збільшується частка автомобілів великої вантажопідйомності (на перевезення будівельних вантажів в Москві середня вантажопідйомність автомобіля 7,5 ... 9,0 т).
Якісний стан транспортного потоку на різних ділянках маршруту визначає можливі режими і умови руху рухомого складу, що, в кінцевому рахунку, і формує рівень результативних показників роботи автотранспортних засобів на маршруті (Середня технічна швидкість руху, час поїздки, добова продуктивність). Тому необхідно визначати умови, в яких протікає транспортний процес. Описати їх можна за допомогою показників дорожнього руху.
Для транспортного потоку характерні три стани:
- вільний рух, яке визначається швидкісними характеристиками автомобілів, що утворюють потік;
- групове, що характеризується яскраво вираженим розпадом потоку на групи, черги автомобілів. Такий рух характерно для міських многополосних магістралей при щільності 10 ... 25 авт. / Км на одну смугу руху; колонне, яке виражається в дотриманні автомобілів за лідером, практично без обгонів.
На рис. 1 в точці 1 вільний рух переходить в групове зі створенням черзі, а в точці 2 перетворюється в суцільну колону через обмеження пропускної здатності магістралі. Колонне рух характерно для міських магістралей великої щільності 25 ... 110 авт. / Км.
Найбільш часто застосовуються для характеристики руху такі параметри, як інтенсивність, склад потоку, щільність, швидкість руху і затримки.
Інтенсивність руху є найважливішою характеристикою транспортного потоку. Найбільш різкі коливання інтенсивності спостерігаються за часом, а також на підходах до міст і населених пунктів.
Склад транспортного потоку характеризується співвідношенням у ньому транспортних засобів різного типу, що значно впливає на параметри дорожнього руху (наприклад, швидкість), завантаження доріг через габаритних розмірів автомобілів, причому особливо важливий динамічний габарит транспортних засобів.
Різний склад транспортного потоку враховується коефіцієнтом приведення. Згідно СНиП П-60-75 автомобілі від 30,0 т і вище мають коефіцієнт приведення 5. Але як показали дослідження, проведені в МАДИ, збільшення довжини і швидкості автомобілів вимагає збільшення коефіцієнта приведення на 3,5 ... 4,5%.
Щільність характеризується числом транспортних засобів на км дороги. Вона має тенденцію до збільшення, особливо в містах.

Мал. 1. Характерні режими руху транспортних потоків
Нижчі швидкості на правій смузі руху залежать не тільки від наявності більш повільно рухаються автомобілів, але і від більшого завантаження її рухом (при двосмугової дорозі в одному напрямку руху на праву її смугу доводиться до 80% інтенсивності, при трехполосной - до 50%).
Збільшення частки звичайних вантажних автомобілів з 20 до 70% знижує швидкість потоку на 10 км / год, а пропускну здатність на 11%.
Швидкість прямо впливає на продуктивність транспортного засобу. Затримки, пов'язані з будь-яким зниженням швидкості щодо дозволеної для даної ділянки, аж до зупинки, призводять до втрат часу, а відповідно і до економічних втрат. Відхилення від бажаних умов руху викликають також нервозність водія, що може стати причиною дорожньо-транспортних пригод.
Пропускна здатність дороги характеризує функціонування шляхів сполучення. У зв'язку з цим виникає проблема організації перевізного процесу таким чином, щоб зниження продуктивності загального транспортного потоку при наявності транспортного засобу з КТГ було найменшим, а народногосподарські витрати - мінімальними.
Стан більшої частини доріг нашої країни є досить великим гальмом для підвищення швидкісних режимів. Швидкість, як відомо, є дієвим фактором підвищення продуктивності, але і величиною, залежною від багатьох обставин. Збільшення швидкостей - це складна проблема, в яку входять організація дорожнього руху (закони формування транспортного потоку, інтенсивність руху, щільність його) і стан доріг, їх якість і кількість. Великий відсоток доріг третьої і нижчих категорій не дає можливості підвищення швидкісного режиму, особливо при збільшенні загальної маси автопоїздів.
В теорії транспортних потоків намітилася група методів, що дозволяють оцінити дорогу по її можливостям підтримки певного швидкісного режиму, що, в свою чергу, на стадії формування транспортної мережі для перевезень може служити достатньою підставою для включення або виключення даної дороги або її ділянки з моделі мережі. Особливе значення цей факт має для специфічних перевезень, які потребують підвищеної швидкісного режиму ( швидка допомога, Пожежні автомобілі, швидкопсувні вантажі та т. П.), А також при формуванні маршруту перевезень великогабаритних та великовагових вантажів, які можуть стати «пробкою» на дорозі, що призведе до значних втрат для решти транспортного потоку, в складі якого будуть автомобілі з вантажами народного господарства, з пасажирами, перевезення спеціального призначення.
Зростання автомобільного парку і обсягів руху значно випереджає розвиток вулично-дорожньої мережі. Так, в Москві щільність магістральних вулиць, що сприймають навантаження, в середньому становить 1,2 ... 1,3 км / км2 при нормі 2,2 ... 2,4 км / км2. У європейській частині країни щільність доріг з твердим покриттям становить 56 м / км2, Тюмені - 0,3 м / км2, Якутії - 0,4 м / км2.
Збільшилася інтенсивність руху при відставанні зростання дорожньо-транспортної мережі призводить до вичерпання пропускної спроможності вулиць і зменшення швидкостей руху в години пік до 5 ... 10 км / год. Існуюча диспропорція призвела і до ускладнення умов дорожнього руху, особливо в великих містах, що стало прямою причиною збільшення дорожньо-транспортних пригод (ДТП) і збільшення нерівномірності руху. Це в свою чергу веде до збільшення собівартості перевезень, негативних наслідків: забруднення повітряного басейну, збільшення шуму і т. Д. Аналіз ДТП показав збільшення їх при 40 ... 60% вантажних автомобілів в змішаному транспортному потоці.
За Москві аналіз маршрутів перевезення КТГ показав, що найбільш задіяні для цих перевезень магістральні вулиці загальною довжиною понад 1000 км (25% від всієї мережі міста). Проведені інститутом Генплану Москви обстеження стану дорожньо-транспортної мережі виявили надмірне навантаження магістралей міста і виходів на позаміські дороги. У Москві практично всі основні напрямки мають ділянки, що працюють по максимуму пропускної здатності.
До числа магістралей з збільшилася завантаженням слід віднести напрямки:
Ленінградське - від площі Білоруського вокзалу до розвилки;
Шереметівське - Ботанічна вул .;
Ярославське -проспект Миру від вул. Докукина до шляхопроводу Северянин;
Косинська - район Преображенської площі;
Ізмайловському -від Електрозаводська моста до вул. Уткіна; ск ^ язанское - Рязанський проспект від Смирновскую вул. до ок
Волгоградське - від Люблінської вул. до МКАД;
Пролетарське -Велозаводская вул. від Східної до Автозаводського вул .:
МКАД - південна ділянка від Волгоградського проспекту до Профспілкової вул.
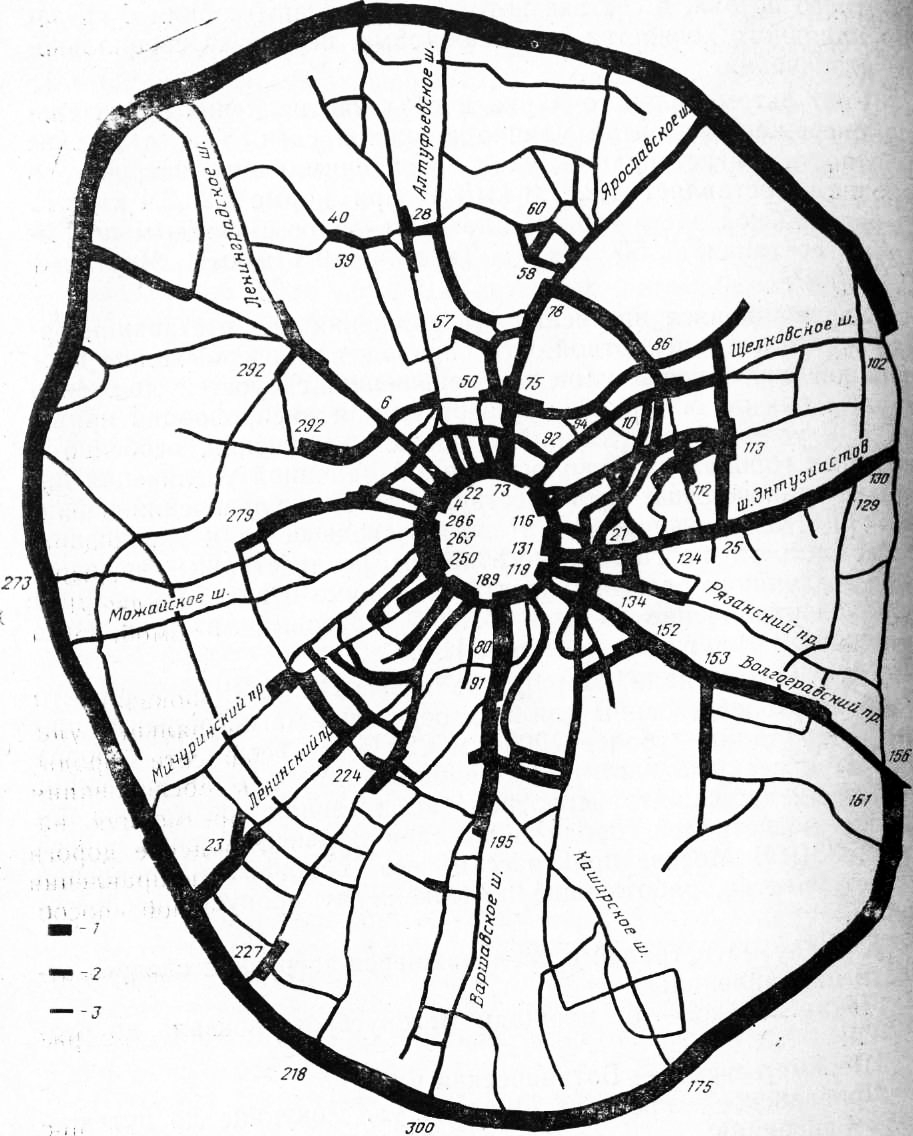
Мал. 2. Стан ділянок транспортно-дорожноп мережі Москви
На перерахованих вище магістралях створюються великі транспортні проблеми в зв'язку з збільшилася завантаженням.
За останні 15 років відбулося збільшення протяжності мережі магістралей, які працюють на межі пропускної здатності, приблизно в 1,5 рази, а протяжність мережі, що працює з незначним запасом від максимальному ступені завантаження, скоротилася. За межами садового кільця на магістральної транспортної мережі відзначені значні коливання (30 ... 40%) рівня завантаження рухом.
Магістральна мережа центральної частини Москви працює приблизно в однакових умовах. Рівень завантаження радіальних напрямків в середньому 0,8 ... 0,9.
Магістральна мережа міста складає 1080 км, з них 135 км (14%) працює по максимальному ступені завантаження. До них належать такі напрямки.
У межах Садового кільця:
Ярославське - вул. Сретенка, вул. Дзержинського;
Косинська - вул. Кірова;
Ізмайловському - вул. Чернишевського, вул. Б. Хмельницького;
Мінське - проспект Калініна від проспекту Маркса до Арбатській площі.
За межами Садового кільця:
Ленінградське - вул. Горького, Бігова вул., Грузинський вал, вул. Алабяна;
Дмитрівське - вулиці Каляевская, Смоленська, Паліха, ділянка Дмитрівського шосе від 3-го Ніжнеліхоборского проїзду до проїзду 5267;
Шереметівське - Шереметьевская вул .;
Волоколамськоє - Волоколамське шосе від вул. Свободи до МКАД;
Ярославське - проспект Миру від Садового кільця до Грохольського пров., Від вул. Кибальчича до вул. Касаткіна;
Косинська - Каланчевская вул., Вул. Русаковская;
Горьковское - Таганська вул., Вул. Нижегородська;
Волгоградське - Волгоградський проспект від пл. Селянської застави до 2-ї вул. машинобудування;
Варшавське - Люсіновская, Б. Тульська, Варшавське шосе від Автозаводського моста до Нагатинской вул .;
Мінське - Смоленська вул .;
Хорошевському - Барикадна вул .;
Садове кільце -від Зубовская площі до Каляевская вул., Колгоспна площа -від Лермонтовській площі до площі, Таганська площа, Ленінська площа;
МКАД-північна частина від Волоколамського шосе до шосе Ентузіастів.
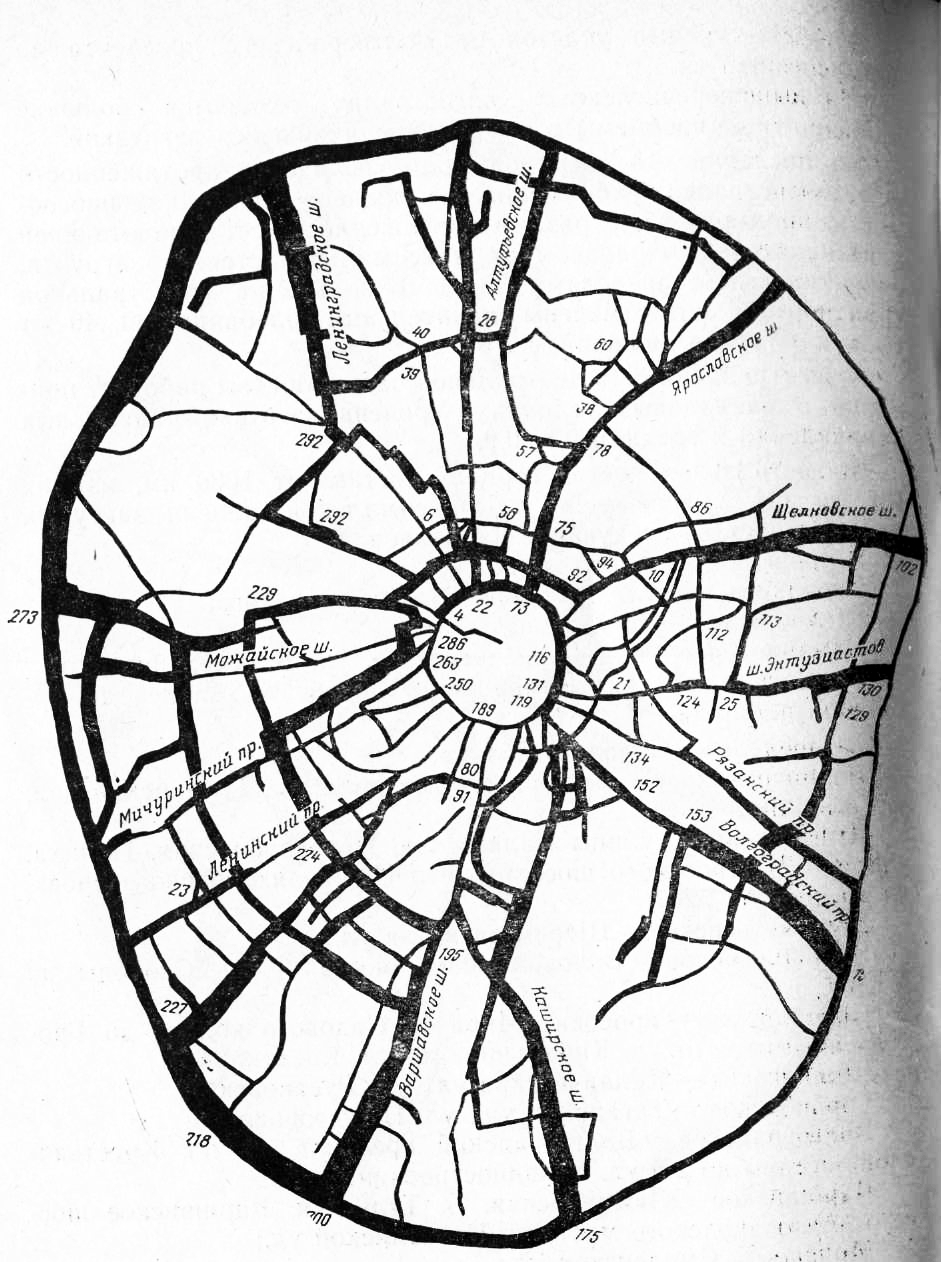
Мал. 3. Інтенсивність розподілу вибіркових маршрутів, з, К\u003e Г I транспортної мережі Москви
При аналізі стану руху на магістралях міста б-чо оброблено близько 400 маршрутів перевезення КТГ масою бо-, iee 30 т, довжиною 12 ... 38,7 м і шириною 3,7 ... 5,6 м, що дало можливість встановити найбільш часто зустрічаються магістралі , використовувані для цих перевезень: Можайское шосе па ділянці від Мінської вул. до МКАД, Ленінградське шосе 0т розвилки з Волоколамському шосе до МКАД, Алтуфьевское шосе від Ботанічній вул., Дмитрівське шосе від розвилки з КОРОВИНСЬКИЙ шосе до МКАД, Ярославське шосе від платформи Северянин до МКАД, шосе Ентузіастів від Окружного проїзду до МКАД, Волгоградський проспект від Люблінської вул. до МКАД, Каширське шосе від Орехово-Борисова до МКАД, Варшавське шосе, ділянка МКАД від Варшавського шосе до Ленінградського.
Значне число перевезень припадає на вулиці: Суслова, Мінська, Бігова, Н. Башилівка, Н. Маслівка, Сущевский вал, Б. Філевська, Шмітовському проїзд, 1905 року, Свободи, Нагірна, Нахімовський проспект, Красикова, Ломоносовський проспект, Люблінська, Профспілкова, Обручева, проспект Миру.
Багато з цих вулиць відносяться до вулиць, які працюють за максимальної пропускної спроможності.
Фактична інтенсивність часто набагато перевищує максимальну, що позначається на швидкостях руху. Швидкість в місті навіть на магістралях не перевищує 40 км / год. Значне зниження швидкості змішаного гютлка відбувається при зменшенні числа смуг руху в одному напрямку. Поява на таких ділянках великовагових і (або) великогабаритних автопоїздів ще більше знижує швидкість транспортного потоку, різко погіршуючи роботу транспорту загального користування, що перевозить пасажирів, а на одпополосних дорогах повністю перекриваючи рух.
Сьогодні як альтернативу для підвищення швидкості транспортного потоку застосовують перевезення КТГ в нічний час, що характеризується меншою інтенсивністю руху, проте ряд перевезень КТГ (особливо важких або великорозмірних) через свою складність вимагає достатньої освітленості дороги (маршруту), перевезення КТГ в нічний час за межами міста взагалі заборонені. Частина перевезень КТГ в місті проходить як транзитна.
У Москві було введено обмеження на транзитний проїзд вантажних автомобілів через центр міста, що сприяло зниженню інтенсивності руху центральної зони в 1,5 рази.
перенесення вантажного руху на нічний час деякими фахівцями, зокрема з Англії, розглядається не як Вдалий через збільшення рівня шуму.
Різний стан транспортного потоку викликає також зміни емоційної напруженості водія. Тому окремими авторами, наприклад Сильянова В. В., розглядаються чотири найбільш характерних стану потоку автомобілів, які враховують «рівень зручності руху» (А, Б, В, Г), т. Е. Якісний стан потоку автомобілів при якому встановлюються характерні умови праці водіїв, умови комфортабельності поїздки і економічності перевезень, а також певний рівень аварійності.
Кожен такий рівень залежить від швидкості і насиченості рухом.
При рівні А автомобіль рухається в вільному стані транспортного потоку, що дає низьку емоційну напруженість водія з повним зручністю його роботи. Автомобілі не взаємодіють між собою, водій витримує необхідну йому швидкість.
При рівні Б автомобіль рухається в груповому стані транспортного потоку, що пов'язує частково рух автомобілів, змушуючи їх робити маневри (обгони). Треба відзначити, що обгін є найбільш складним і небезпечним маневром, що здійснюються водієм для досягнення необхідної йому швидкості.
З ростом числа повільно рухаються автомобілів зростає число обгонів, причому найбільша їх кількість відзначається при щільності руху 15 ... 25 авт. / Км. Емоційна напруженість водія нормальна, але відчуття у нього вельми зручному. Починається падіння середніх швидкостей руху.
Рівень Б характеризується відносно великим числом і високою вагою ДТП.
При рівні В відбувається як би перехід руху [прикордонне щодо точки стан в зв'язаний стан з утрудненим маневруванням і високою емоційною напруженістю водія. Відчуття водія незручні. Водій переоцінює швидкість руху попереду автомобіля, що йде, а в інших випадках і обрану дистанцію, що призводить до ДТП.
При рівні Г (колонне стан) утворюється щільний суцільний потік з малими швидкостями руху або з зупинками аж до заторів при низькій або дуже низькою емоційної напруженості водія, який відчуває себе дуже незручно. У цих умовах швидкості автомобілів близькі між собою.
Основний причиною ДТП є недотримання водіями безпечної дистанції між автомобілями. Рух відбувається з неекономічними швидкостями і різкою нерівномірністю руху.
Щільність підвищується також на окремих ділянках при наявності ухилів, залізничних переїздів, перехрещень в одному рівні, на ділянках звуження проїзної частини і т. Д.
У населених пунктах спостерігається максимальна щільність через 150 ... 200 м після входу в населений пункт: 110 авт. / Км при середній довжині автомобілів 6 м.
Можливості маневрування, обгону залежать значною мірою від характеристик дорожньої мережі, зокрема від ширини проїзної частини. Істотним обставиною є також габарити транспортних засобів. У більшості випадків склад потоку на вулицях міста змішаний, за винятком вулиць із забороною вантажного руху. Однак і на таких вулицях може бути присутнім більш габаритний пасажирський транспорт загального користування. Периферійна зона міста і позаміські магістралі характеризуються підвищеною часткою вантажного руху.
Сучасні моделі дослідження транспортних потоків дозволяють отримувати розподіл швидкостей руху автомобілів різних типів, числа автомобілів на ділянці і в перетині перегону, інтервалів в потоці, довжини черг на перегоні, ступеня завантаження перегону, числа реалізованих і нереалізованих обгонів, час очікування на перехресті і інші моменти.
Для контролю швидкості, інтенсивності, складу і числа транспортних засобів розроблені різні системи оперативного управління впливом автотранспортних потоків на міське середовище, які обмежують швидкість руху автомобілів, координують роботу світлофора на перетині транспортних магістралей, перерозподіляють транспортні потоки по вулично-дорожньої мережі міста, обмежують в'їзд на певну ділянку мережі певного типу автомобілів або повністю (тимчасово) закривають його для руху. Такі системи можуть дати достатньо повну інформацію для дослідження режимів руху великовагового великогабаритного вантажу в загальному транспортному потоці.
Транспортний, змішаний потік складається зазвичай з «повільних», більш важких вантажних автомобілів або автомобілів спеціального призначення та «швидких» легкових або вантажних автомобілів меншою вантажопідйомності, що мають відповідно швидкість вільного руху і v2 (Vi Залежно від ширини проїзної частини та організації руху можливі наступні варіанти руху. При одній смузі руху в одну сторону (дороги нашої країни в основному двохсмугові) «швидкі» і «повільні» автомобілі рухаються: спільно, при двох і більше смугах одну відводять для «повільних», іншу - для «швидких» автомобілів і при цьому на кожній смузі зберігається швидкість вільного руху: Мал. 2. Діаграми транспортного потоку: I-VI - відсоток «швидких» автомобілів (100, 90, 60, 40, 10, 0%). Суцільні криві - залежності між швидкістю і щільністю, а штрихпунктирні - та ж залежність, але з урахуванням інтенсивності Щільність на смузі г змінюється в результаті зміни щільності потоку «швидких» автомобілів. Швидкість руху транспортних засобів пов'язана з щільністю залежністю, представленої на рис. 2. Ця залежність враховує склад транспортного потоку. Діаграма транспортного потоку, т. Е. Співвідношення між швидкістю, інтенсивністю і щільністю, показує що при певному складі потоку на певній довжині ділянки (в нашому випадку I \u003d 600 м) наявність «повільних» автомобілів може знижувати пропускну спроможність магістралі, що високе значення швидкості досягається частіше при менших щільності руху і т. д. Фактори, що впливають на пропускну здатність, мало вивчені. Одним з основних є швидкість, що залежить від складу потоку, ширини проїзної частини та ін. Дослідниками було зафіксовано прогресуюче падіння швидкості у всіх автомобілів, що рухаються в групі, після зниження швидкості автомобіля, що рухається в групі першим при 15 ... 18 автомобілях в групі зниження швидкості першого з 55 ... 60 до 30 ... 35 км / год викликало зупинку останніх автомобілів і виникнення затору. Розрахунки проводили за вихідної інформації для згадуваної вище перевезення в м Подільському. Оскільки перевозився найважчий вантаж масою 322 т, то швидкість його не повинна була перевищувати 5 км / год (особливо важкі вантажі возять з низькими скоростямі- 0J5 ... 10 км / год). Максимальна інтенсивність руху за даними ДАІ 320 автомобілів на годину, ширина дороги 7 м, ширина вантажу в транспортному положенні 6 м. Швидкість «швидких» автомобілів v2 приймемо за 30 км / год, що характерно для умов м Подольська. Імовірність d вільного руху «швидких» автомобілів змінюватимемо від 0,5 до 1Д Послідовно приймаючи v2 від 30 км / год при різних значеннях d, розрахуємо відповідне значення середньої швидкості і руху «швидких» автомобілів за вищевказаною формулою. Державтоінспекція вживає заходів щодо впорядкування організації двіженія__на ділянці, якщо зниження швидкості на ньому відбувається на 33%. Це дає нам можливість прийняти цей же. рівень для своїх розрахунків. Однак вважаємо, що допустима межа зниження швидкості під час перевезення КТГ вимагає подальшого дослідження з урахуванням конкретної перевезення і транспортної обстановки в регіоні. Для розрахунків необхідно визначити інтенсивність руху транспортного потоку в наведених одиницях. Коефіцієнт приведення в даному випадку як показали розрахунки може бути прийнятий 14. Знаючи інтенсивність руху і швидкість v2 і задаючи v2, можна визначити частку часу (ймовірність) d, протягом якої автомобілі можуть рухатися вільно зі швидкістю v2, і число автомобілів, яке пройде за цей період d. На будь-якій ділянці маршруту беремо фактичну швидкість автомобілів і визначаємо по рис. 41 до якого значення можемо її знизити (не більше 33%), що дасть період часу, протягом якого буде відбуватися це зниження. Мал. 3. Зміна середньої та фактичної швидкостей руху в загальному потоці Наприклад, і 2 \u003d 30 км / год, повинна бути 20 км / год при d-0,6. Це означає, що близько 60% автомобілів проїдуть без затримок (т. Е. З нормальною швидкістю), 40% будуть накопичуватися в чергу (колону очікування), якщо ширина проїзної частини не більше ширини автомобіля з КТГ, так як обгін в цьому випадку неможливий . Якщо відбувається падіння швидкості транспортного потоку при спільному русі з КТГ на тому ж перегоні, то воно, в свою чергу, дає падіння продуктивності рухомого складу цього потоку, так як між швидкістю і продуктивністю є відома залежність. До атегорія: - Перевезення великогабаритних вантажів

